Ricerca · Sviluppo algoritmi

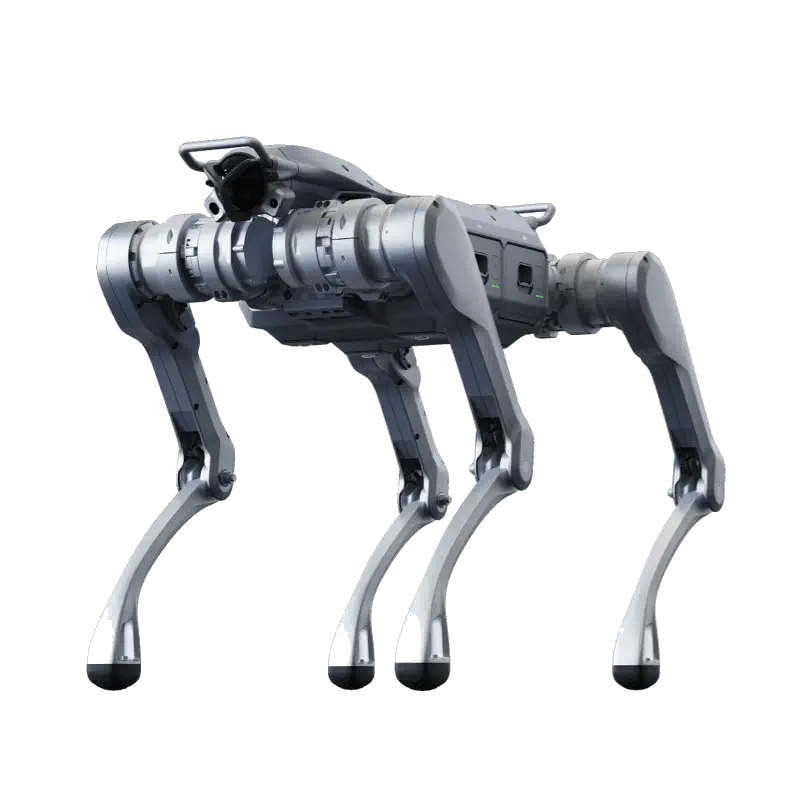
Unitree G1 EDU
Umanoide · 23 DoF
Unitree G1 EDU Standard
23 DoF base · espandibile a 43
Altezza1270 mm
Peso~35 kg
Gradi libertà23 (espand. 43)
Autonomia~2 ore
- Coppia ginocchio88 N·m (EDU Standard)
- Carico braccio2 kg per braccio
- ComputingNVIDIA Jetson Orin 40 TOPS (EDU Standard)
- VisioneTelecamera di profondità + LiDAR 3D
- ConnettivitàWi-Fi 6 · Bluetooth 5.2
- SDKC++, Python, ROS2 (aperto)
- Mani optionalDex3-1 force-controlled · Inspire RH56 compatibili
- AI frameworkUnifoLM-VLA-0 open-source (12 categorie task)
Caso d'uso chiave
Ricerca su locomotion control, manipulation bimane, imitation learning, HRI, sviluppo algoritmi VLA su piattaforma fisica.
Repository proprietari inclusi
L'acquisto di robot o percorsi di formazione include le nostre librerie proprietarie su GitHub: stack di partenza testati e mantenuti dal team Abra.