Research · Algorithm development

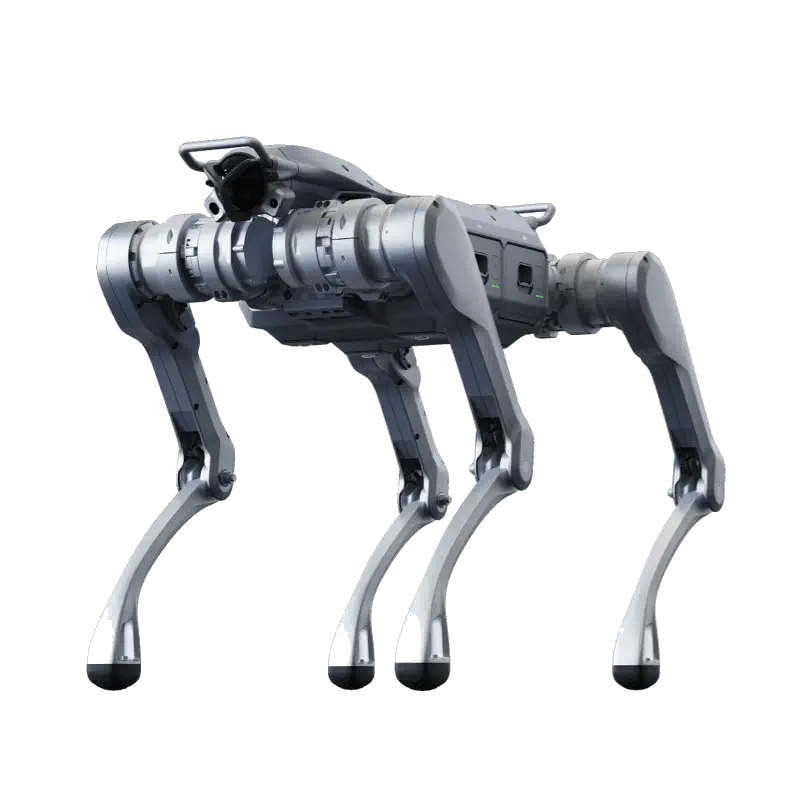
Unitree G1 EDU
Humanoid · 23 DoF
Unitree G1 EDU Standard
23 DoF base · expandable to 43
Height1270 mm
Weight~35 kg
DOF23 (expand. 43)
Battery life~2 hrs
- Knee torque88 N·m (EDU Standard)
- Arm payload2 kg per arm
- ComputingNVIDIA Jetson Orin 40 TOPS (EDU Standard)
- VisionDepth camera + 3D LiDAR
- ConnectivityWi-Fi 6 · Bluetooth 5.2
- SDKC++, Python, ROS2 (open)
- Optional handsDex3-1 force-controlled · Inspire RH56 compatible
- AI frameworkUnifoLM-VLA-0 open-source (12 task categories)
Key use case
Research on locomotion control, bimanual manipulation, imitation learning, HRI, and VLA algorithm development on physical hardware.
Proprietary repositories included
Robot or training program purchases include our proprietary GitHub libraries: tested starter stacks maintained by the Abra team.